විද්යාවේ සහ තාක්ෂණයේ අඛණ්ඩ දියුණුවත් සමඟ, ලේසර් පරාස සොයාගැනීමේ තාක්ෂණය තවත් ක්ෂේත්රවලට පිවිස ඇති අතර එය පුළුල් ලෙස යොදාගෙන ඇත. ඉතින්, ලේසර් පරාස සොයාගැනීමේ තාක්ෂණය පිළිබඳ අප දැනගත යුතු අත්යවශ්ය කරුණු කිහිපයක් මොනවාද? අද අපි මෙම තාක්ෂණය පිළිබඳ මූලික දැනුමක් බෙදා ගනිමු.
1.ලේසර් පරාස සොයාගැනීම ආරම්භ වූයේ කෙසේද?
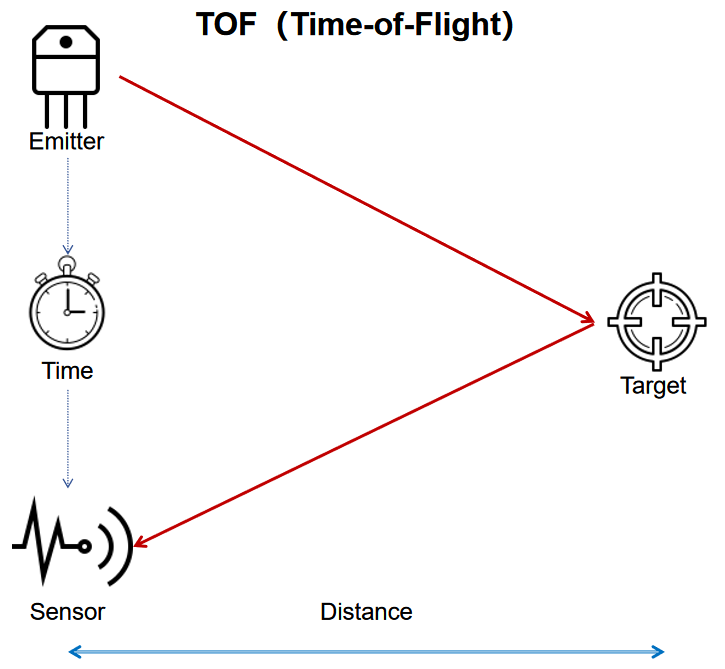
1960 ගණන්වල ලේසර් පරාස සොයාගැනීමේ තාක්ෂණයේ නැගීම දක්නට ලැබුණි. මෙම තාක්ෂණය මුලින් තනි ලේසර් ස්පන්දනයක් මත විශ්වාසය තැබූ අතර දුර මැනීම සඳහා පියාසර කාලය (TOF) ක්රමය භාවිතා කළේය. TOF ක්රමයේදී, ලේසර් පරාස සොයාගැනීමේ මොඩියුලයක් ලේසර් ස්පන්දනයක් නිකුත් කරන අතර, එය ඉලක්ක වස්තුව මගින් ආපසු පරාවර්තනය කර මොඩියුලයේ ග්රාහකයා විසින් ග්රහණය කර ගනු ලැබේ. ආලෝකයේ නියත වේගය දැන ගැනීමෙන් සහ ලේසර් ස්පන්දනය ඉලක්කයට සහ පසුපසට ගමන් කිරීමට ගතවන කාලය නිවැරදිව මැනීමෙන්, වස්තුව සහ පරාස සොයාගැනීම අතර දුර ගණනය කළ හැකිය. අදටත්, වසර 60 කට පසුවත්, බොහෝ දුර මැනීමේ තාක්ෂණයන් තවමත් මෙම TOF මත පදනම් වූ මූලධර්මය මත රඳා පවතී.
2. ලේසර් පරාස සොයාගැනීමේදී බහු ස්පන්දන තාක්ෂණය යනු කුමක්ද?
තනි ස්පන්දන මිනුම් තාක්ෂණය පරිණත වීමත් සමඟ, තවදුරටත් ගවේෂණය බහු ස්පන්දන මිනුම් තාක්ෂණයේ පර්යේෂණාත්මක යෙදීමට හේතු විය. ඉතා විශ්වාසදායක TOF ක්රමය මත පදනම් වූ බහු ස්පන්දන තාක්ෂණය, අවසාන පරිශීලකයින්ගේ අතේ ඇති අතේ ගෙන යා හැකි උපාංගවලට සැලකිය යුතු ප්රතිලාභ ගෙන දී ඇත. නිදසුනක් වශයෙන්, සොල්දාදුවන් සඳහා, ඉලක්ක ඉලක්ක කර ගැනීමට භාවිතා කරන අතින් ගෙන යා හැකි උපාංග සුළු අත් වෙව්ලීමේ හෝ සෙලවීමේ නොවැළැක්විය හැකි අභියෝගයට මුහුණ දෙයි. එවැනි කම්පන නිසා තනි ස්පන්දනය ඉලක්කය මග හැරේ නම්, නිවැරදි මිනුම් ප්රතිඵල ලබා ගත නොහැක. මෙම සන්දර්භය තුළ, බහු ස්පන්දන තාක්ෂණය එහි තීරණාත්මක වාසි පෙන්වයි, මන්ද එය අතින් ගෙන යා හැකි උපාංග සහ තවත් බොහෝ ජංගම පද්ධති සඳහා ඉතා වැදගත් වන ඉලක්කයට පහර දීමේ සම්භාවිතාව සැලකිය යුතු ලෙස වැඩි දියුණු කරයි.
3. ලේසර් පරාස සොයාගැනීමේදී බහු ස්පන්දන තාක්ෂණය ක්රියා කරන්නේ කෙසේද?
තනි ස්පන්දන මිනුම් තාක්ෂණය හා සසඳන විට, බහු ස්පන්දන මිනුම් තාක්ෂණය භාවිතා කරන ලේසර් රේන්ජ්ෆයින්ඩර් දුර මැනීම සඳහා එක් ලේසර් ස්පන්දනයක් පමණක් නිකුත් නොකරයි. ඒ වෙනුවට, ඔවුන් ඉතා කෙටි ලේසර් ස්පන්දන මාලාවක් (නැනෝ තත්පර පරාසය තුළ පවතිනු ඇත) අඛණ්ඩව යවයි. මෙම ස්පන්දන සඳහා මුළු මිනුම් කාලය මිලි තත්පර 300 සිට 800 දක්වා පරාසයක පවතින අතර, භාවිතා කරන ලේසර් රේන්ජ්ෆයින්ඩර් මොඩියුලයේ ක්රියාකාරිත්වය මත රඳා පවතී. මෙම ස්පන්දන ඉලක්කයට ළඟා වූ පසු, ඒවා ලේසර් රේන්ජ්ෆයින්ඩරයේ ඉතා සංවේදී ග්රාහකයා වෙත නැවත පරාවර්තනය වේ. ඉන්පසු ග්රාහකයාට ලැබුණු දෝංකාර ස්පන්දන සාම්පල ලබා ගැනීමට පටන් ගන්නා අතර, ඉතා නිරවද්ය මිනුම් ඇල්ගොරිතම හරහා, චලිතය හේතුවෙන් පරාවර්තනය වූ ලේසර් ස්පන්දන සීමිත සංඛ්යාවක් පමණක් ආපසු ලබා දෙන විට පවා (උදා: අතින් භාවිතා කිරීමෙන් සුළු කම්පන) විශ්වාසදායක දුර අගයක් ගණනය කළ හැකිය.
4. ලුමිස්පොට් ලේසර් පරාස සොයාගැනීමේ නිරවද්යතාවය වැඩි දියුණු කරන්නේ කෙසේද?
- කොටස් මාරු කිරීමේ මිනුම් ක්රමය: නිරවද්යතාවය වැඩි දියුණු කිරීම සඳහා නිරවද්ය මිනුම්
නිරවද්ය මිනුම් කෙරෙහි අවධානය යොමු කරන ඛණ්ඩිත මාරු කිරීමේ මිනුම් ක්රමයක් ලුමිස්පොට් විසින් භාවිතා කරයි. දෘශ්ය මාර්ග නිර්මාණය සහ උසස් සංඥා සැකසුම් ඇල්ගොරිතම ප්රශස්ත කිරීම මගින්, ලේසර්හි ඉහළ ශක්ති ප්රතිදානය සහ දිගු ස්පන්දන ලක්ෂණ සමඟ ඒකාබද්ධව, ලුමිස්පොට් වායුගෝලීය මැදිහත්වීම් සාර්ථකව විනිවිද යන අතර, ස්ථාවර සහ නිවැරදි මිනුම් ප්රතිඵල සහතික කරයි. මෙම තාක්ෂණය ඉහළ සංඛ්යාත පරාස සොයාගැනීමේ උපාය මාර්ගයක් භාවිතා කරයි, අඛණ්ඩව බහු ලේසර් ස්පන්දන විමෝචනය කර දෝංකාර සංඥා රැස් කරයි, ශබ්දය සහ මැදිහත්වීම් ඵලදායී ලෙස මර්දනය කරයි. මෙය සංඥා-ශබ්ද අනුපාතය සැලකිය යුතු ලෙස වැඩි දියුණු කරයි, නිරවද්ය දුර මැනීම සාක්ෂාත් කර ගනී. සංකීර්ණ පරිසරවල හෝ කුඩා වෙනස්කම් සහිතව වුවද, ඛණ්ඩිත මාරු කිරීමේ මිනුම් ක්රමය නිවැරදි සහ ස්ථාවර ප්රතිඵල සහතික කරයි, එය මිනුම් නිරවද්යතාවය වැඩි දියුණු කිරීම සඳහා තීරණාත්මක තාක්ෂණයක් බවට පත් කරයි.
– පරාස සොයාගැනීමේ නිරවද්යතාවය සඳහා ද්විත්ව එළිපත්ත වන්දි: අතිශය නිරවද්යතාවය සඳහා ද්විත්ව ක්රමාංකනය
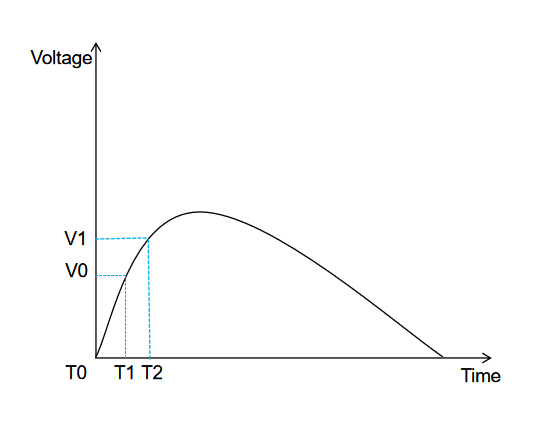
ලුමිස්පොට් මූලික ද්විත්ව ක්රමාංකන යාන්ත්රණයක් සහිත ද්විත්ව-එළිපත්ත මිනුම් ක්රමයක් ද භාවිතා කරයි. පද්ධතිය මුලින්ම ඉලක්කයේ දෝංකාර සංඥාවේ තීරණාත්මක කාල ලක්ෂ්ය දෙකක් ග්රහණය කර ගැනීම සඳහා වෙනස් සංඥා සීමාවන් දෙකක් සකසයි. විවිධ සීමාවන් නිසා මෙම කාල ලක්ෂ්ය තරමක් වෙනස් වේ, නමුත් මෙම වෙනස දෝෂ සඳහා වන්දි ගෙවීමට යතුර බවට පත්වේ. ඉහළ නිරවද්යතාවයකින් යුත් කාල මිනුම් සහ ගණනය කිරීම හරහා, පද්ධතියට මෙම කාල ලක්ෂ්ය දෙක අතර කාල වෙනස නිවැරදිව ගණනය කළ හැකි අතර මුල් පරාස සොයාගැනීමේ ප්රතිඵලය සියුම් ලෙස සකස් කළ හැකි අතර, පරාස සොයාගැනීමේ නිරවද්යතාවය සැලකිය යුතු ලෙස වැඩි දියුණු කරයි.
5.ඉහළ නිරවද්යතාවයකින් යුත්, දිගු දුර ලේසර් පරාස සොයාගැනීමේ මොඩියුල විශාල පරිමාවක් අල්ලා ගනීද?
ලේසර් රේන්ජ්ෆයින්ඩර් මොඩියුල වඩාත් පුළුල් ලෙස සහ පහසුවෙන් භාවිතා කිරීම සඳහා, අද දින ලේසර් රේන්ජ්ෆයින්ඩර් මොඩියුල වඩාත් සංයුක්ත හා විශිෂ්ට ආකාර බවට පරිණාමය වී ඇත. උදාහරණයක් ලෙස, ලුමිස්පොට් හි LSP-LRD-01204 ලේසර් රේන්ජ්ෆයින්ඩර් එහි ඇදහිය නොහැකි තරම් කුඩා ප්රමාණය (ග්රෑම් 11 ක් පමණි) සහ සැහැල්ලු බර මගින් සංලක්ෂිත වන අතර ස්ථාවර ක්රියාකාරිත්වය, ඉහළ කම්පන ප්රතිරෝධය සහ පන්තියේ I අක්ෂි ආරක්ෂාව පවත්වා ගනී. මෙම නිෂ්පාදනය අතේ ගෙන යා හැකි බව සහ කල්පැවැත්ම අතර පරිපූර්ණ සමතුලිතතාවයක් පෙන්නුම් කරන අතර ඉලක්ක කිරීම සහ රේන්ජ්ෆයින්ඩින්, විද්යුත්-දෘශ්ය ස්ථානගත කිරීම, ඩ්රෝන යානා, මිනිසුන් රහිත වාහන, රොබෝ විද්යාව, බුද්ධිමත් ප්රවාහන පද්ධති, ස්මාර්ට් සැපයුම්, ආරක්ෂිත නිෂ්පාදනය සහ බුද්ධිමත් ආරක්ෂාව වැනි ක්ෂේත්රවල බහුලව භාවිතා වේ. මෙම නිෂ්පාදනයේ සැලසුම ලුමිස්පොට් හි පරිශීලක අවශ්යතා පිළිබඳ ගැඹුරු අවබෝධය සහ තාක්ෂණික නවෝත්පාදනයේ ඉහළ ඒකාබද්ධතාවය සම්පූර්ණයෙන්ම පිළිබිඹු කරන අතර එය වෙළඳපොලේ කැපී පෙනේ.
ලුමිස්පොට්
ලිපිනය: ගොඩනැගිල්ල 4 #, අංක 99 ෆුරොන්ග් 3 වන පාර, ෂිෂාන් දිස්ත්රික්කය. වුක්සි, 214000, චීනය
දුරකථන: + 86-0510 87381808.
ජංගම: + 86-15072320922
Email: sales@lumispot.cn
පළ කළ කාලය: ජනවාරි-06-2025